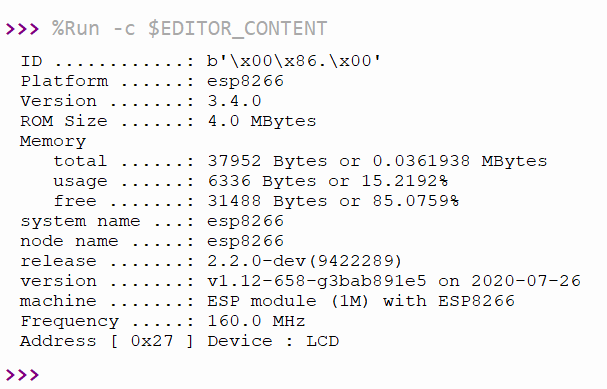
For ESP8266’s MicroPython to perform mathematical calculations like using Python’s numpy library, MicroPython with ulab must be installed. You can download firmware for ESP8266 HERE. For normal ESP32 and with additional PSRAM (SPIRAM).
This article is an introduction to ulab and an overview of the libraries within ulab for further application.